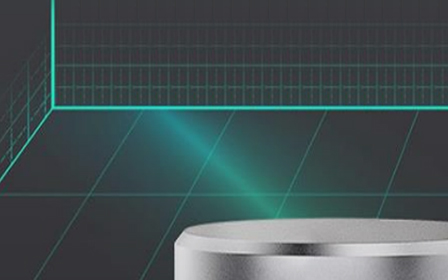
全景扫测:360〫全方位扫描,每秒2000次高速激光三角测距,探测景深达10m
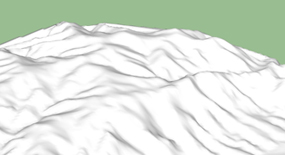
自主建模:探测场景自主建模,生成场景二维模型图
自主避障:自主发现障碍物,自主采取避障措施(翻越或绕行)
自主寻道:发现火源或接收目的地坐标行进指令时,自动规划出最佳路线,自主前行
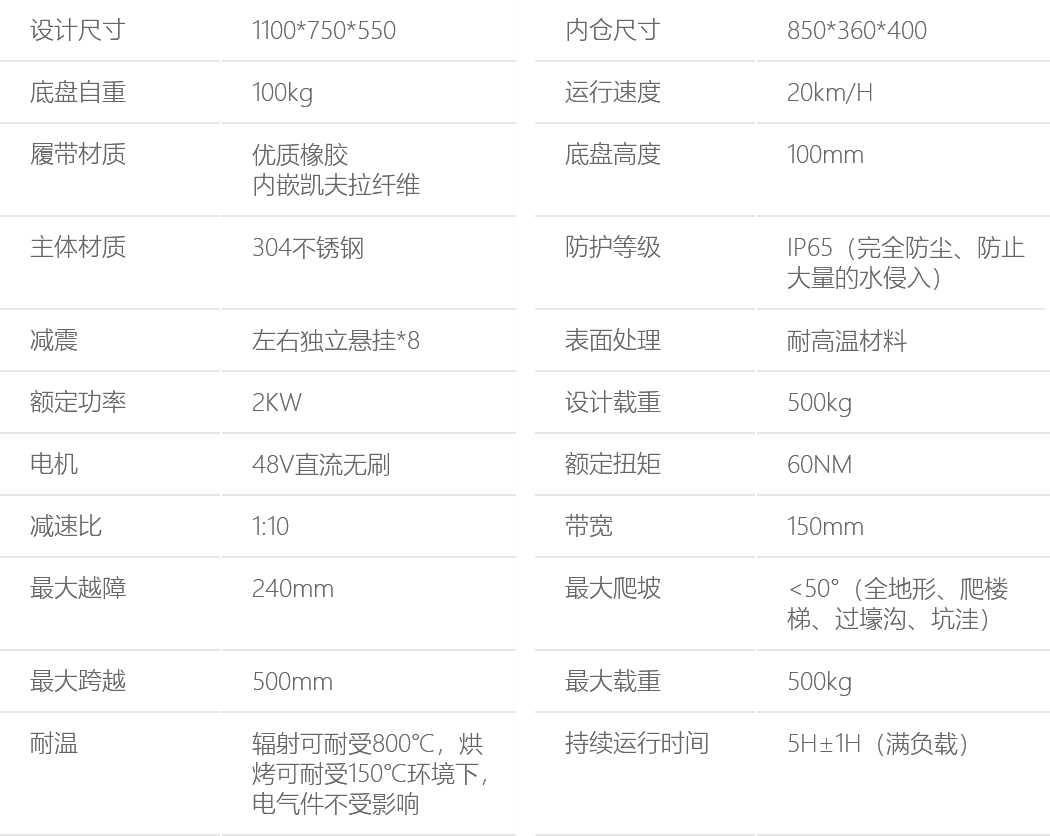
最高行进速度达 20km/h。
行进中 360〫零半径自由转向
可在各种复杂环境中超机动高速巡航
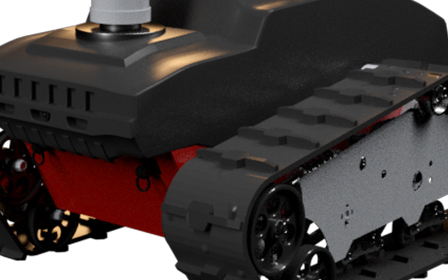
装备防火履带
具备 50〫仰角爬坡能力
能穿越壕沟、攀爬楼梯、翻越障碍,可快速通过各种复杂地型
全面防火、防震、防撞击和防倾覆设计,IP65等级防水、防尘
LED可变角度探照灯和夜视装置
通用型底盘、模块化车体
可根据任务需要,自由加装各种功能性部件
如:牵引装置、破拆装置、探测装置、清障装置等
全电力推进
无任何污染物排放
快速充电技术
60分钟内即可充电60%以上
一次充电,可连续工作4小时以上
控制系统、电源系统、动力系统、传动系统、消防系统、救援系统、清障系统、探测系统等均采用模块化设计
可随时以更换模块的方式修复受损设备
巡检
实时采集图像,声音,温度,烟雾,甲烷,对巷道内各类故障进行实时监测与诊断。
勘察
能够完成在各种天气状况、各种地形地貌环境中的作业。
探测
行进速度快,工作效率高,特别适合大面积区域的快速检查。
建模
探测场景自主建模,生成场景二维模型图。